無人機市場2020年將達283億美元
使用主/被動遙感對環境進行精確展現和3D重建���,已成為各個制圖應用的必備功能��。但由于傳統制圖方式(即載人飛機和地面移動制圖)的成本和所需的技術水平過高��,無法滿足這些應用的需求。
近年來���,軟硬件技術取得了重大突破,現在通過對低成本數碼相機、激光掃描儀和導航系統的集成���,可以不再依賴于傳統昂貴的數據采集系統,就能進行精確的3D制圖。
隨著傳感器技術的高速發展,無人駕駛飛行器(UAV)正在成為一種成本低���、實用性強的移動制圖平臺。無人機比載人飛機飛行的更慢,從而能夠獲取的數據分辨率更高�����。另外���,無人機系統存儲和部署成本較低,可以減輕重復覆蓋采集所帶來的經濟損失。此外,在載人飛機和地面移動制圖系統之間,無人機平衡了二者在分辨率�����、覆蓋面和重復能力等方面的差異�����。這些優勢使UAV成為既經濟又快速的最佳制圖平臺。
反過來無人機可以作為制圖平臺���,也促進了無人機產業的發展。無人機市場在2016年估值為13.22億美元���,到2020年預計將達到282.7億美元,而這期間的年復合增長率為13.51%���。
UAV作為制圖平臺任重而道遠
無人機的潛力毋庸置疑,但若想讓無人機作為一種可操作的移動地圖平臺而廣泛推廣��,那么我們仍然面臨很多挑戰�����。
首先���,就是國家對于無人機制圖飛行的限制政策��。此前,泰伯網曾報道過全球246個國家的無人機法律法規��,各國對于無人機的態度各不相同�����,尤其是對于配有導航和主/被動成像傳感器的制圖無人機���,如何獲得安全許可仍是一個主要問題。例如在某些限制空域(商業/軍事機場附近)���,無人機制圖飛行是被禁止的。
其次�����,專業飛行員需求增加���。UAV攜帶的傳感器等設備��,通常比無人機本身貴30多倍���,相對于載人飛機和地面制圖��,UAV制圖可靠性風險更大,需要大量專業飛行員來安全可靠地操作系統�����。
另外��,無人機飛行時效及其有限��。對于小微型無人機(距地面低于100米)來說,一般平均電池壽命僅為30~45分鐘�����,大大限制了采集區域范圍��,尤其是在低空飛行獲取高分辨率數據時��。
此外,對于小微型(尤其是固定翼)無人機��,有效載荷能力(即可搭載的設備數量)也相當有限�����。盡管多轉子UAV系統具有更高的有效載荷能力,最高可達幾公斤�����,但增加有效載荷將會減少飛行時間。
無人機上有限的傳感器設備,包括定位定姿導航系統�����、主被動成像系統���,這些設備要求精確地系統校準��,如傳感器的固有參數和安裝參數等���。
UAV制圖系統需要有更高的平臺集成能力���。無人機移動制圖應用范圍甚廣�����,而一種系統集成配置方案不可能滿足所有應用領域的需求。因此,需要平臺集成人員,既要熟悉應用領域�����,又要有傳感器集成(例如不同傳感器之間的同步和通信)經驗���,根據不同的應用�����,對平臺進行個性化軟硬件配置。
最后���,我們需要針對不同應用領域的需求,提高數據處理能力�����。尤其是在測繪業界�����,非?����?粗夭煌A段對數據處理質量的控制,以便最終獲得滿足應用需求的數據產品���。
輕量級POS單元定位精度可達2厘米
由于無人機移動制圖擁有巨大的發展潛力,所以��,專業研究機構一直在積極的探索�����,在小微型無人機的主/被動數字成像系統的系統開發和數據采集方面��,已經取得了重大突破。
首先���,得益于全球導航衛星系統(GNSS)和慣性導航系統(INS)軟硬件的持續發展,定位定姿系統(POS)單元的重量可低于100克���,定位精度為2~5厘米��,姿態精度達到0.02~0.08度���。這些進展大大減輕了被動成像系統的地面控制���,同時有效地促進機上Lidar派生出更可靠的產品���。
無人機上配置的具有GNSS / INS同步功能的數碼相機�����,像素超過40萬���,且成本降低���,并可以對拍攝圖像進行精確的時間標記��。在生產準確的正射影像和數字表面模型上,這些功能可以減少對地面控制的要求��。
激光雷達成本再創新低�����。由于激光測距和掃描技術的最新發展���,使重量小于1公斤的激光雷達��,價格降至1萬美元。同時���,這些激光雷達每秒可提供超過25萬脈沖��,范圍精度達到厘米級���。正是由于激光雷達在重量和成本上存在這些優勢��,所以我們可以用數字照相機來擴充系統,同時又不會過度增加總有效載荷的成本和重量���。
由于數字成像技術的進步,輕量級的多光譜和高光譜成像系統進入了實際應用階段���。因此,配備輕量級的多光譜和高光譜成像系統的UAV移動制圖系統���,便可以提供比RGB數碼相機更高的光譜分辨率和更寬的光譜范圍的圖像,滿足特殊應用需求�����。
市場上的圖像數據處理軟件也可為我們所用���,提高圖像處理的質量和效率��。近年來���,由于攝影測量和計算機視覺軟件工具取得了進展��,制圖人員可以使用一些商業軟件,這些軟件能夠處理成百上千甚至成千上萬的圖像,最后產生精確的正射影像和密集的數字表面模型���。
在系統校準方面,研究機構也在不斷創新,他們已經成功研發出進行準確系統校準的工具��,為位置姿態單元(例如GNSS / INS )提供主/被動圖像傳感器的固有參數和相關配置參數�����,除此之外,還能對校準參數的穩定性進行定量評估。
最后,研究機構一直在探索多傳感器/多平臺數據集成的創新方法�����,這種解決方案可以在廣泛的電磁頻譜(如RGB�����、多光譜和高光譜遙感數據以及基于雷達的點云)中���,將主動和被動傳感器數據進行集成��。
UAV移動制圖系統需要行業標準化的規范
近年來,UAV移動制圖的相關技術和數據處理能力都取得了長足的進步���,所以能夠滿足大量應用的需求�����,例如在測量、基礎設施監測和農業管理等領域,已經開始大范圍應用專業級無人機�����,這些無人機配有GNSS / INS�����、以及可以在電磁頻譜的不同波段內運行的主被動數字成像系統��。
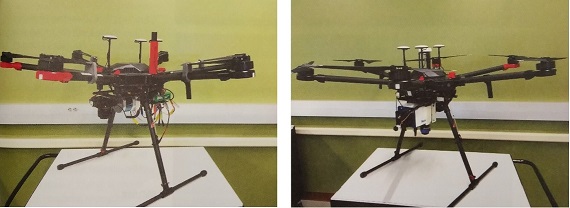
圖1~圖5展示了多轉子無人機平臺采集的圖像,分別配備了直接地理參照的RGB ��、激光雷達��、短波紅外(SWIR)成像系統,生成的正射影像和數字表面模型。
多轉子無人機平臺
某農田的RGB正射圖
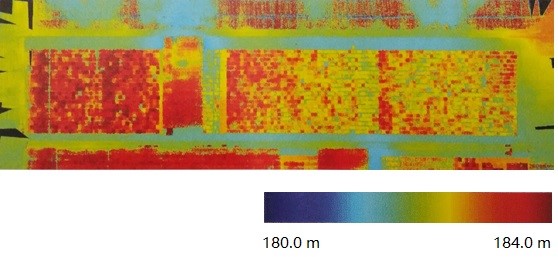
基于影像的數字表面模型
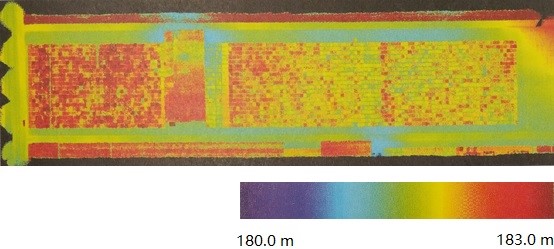
基于雷達的數字表面模型
短波紅外正射圖
為了在業界獲得廣泛認可,還應該建立一些行業標準化�����,如用于采購前演示的最佳應用案例��、采購后提供的使用指導等�����,以確保在實際應用中采集數據的有效性,同時降低技術操作難度�����。
雖然基于無人機的移動制圖系統不太可能取代載人飛機和地面制圖��,但是前者在滿足成本效益上對后者進行了補充��。此外,無人機采集的圖像和激光雷達數據�����,將來可能與傳統制圖平臺采集的地理空間數據進行集成��,更加能提高成本效益��。
本文根據Ayman Habib博士《UAV-based Mobile Mapping: Potential, Challenges and Outlook》(無人機移動制圖:潛力、挑戰和展望)文章進行編譯改編的。